 GDU
GDU
 UUUFLY
UUUFLY DJI
DJI MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN KÖL
KÖL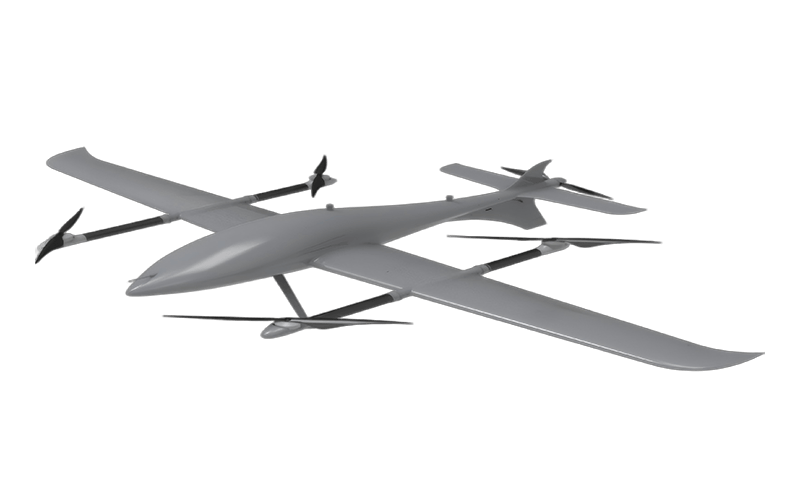 SKY NÄSTA
SKY NÄSTA- DJI Matrice-4T
- DJI Matrice 4E Drönare
- DJI Matrice 4TD
- DJI Matrice 30T
- DJI Mavic 3 Emerprise
- DJI Mavic 3M Multispektral Drönare
- DJI RC 2 Plus Industry Plus
- DJI Matrice 4-seriens batteri
- DJI Matrice 4D-seriens batterier
- TB65 Intelligent flygbatteri
- TB100 Smart Flight-batteri
- WB37 Batteri
- DJI-tillbehör

Dragonfish Standard: Nästa generations multimission eVTOL
Dragonfish Standard mångsidig multiuppdrags eVTOL-dron
Balanserad uthållighet, flexibilitet i nyttolast och snabb driftsättning för industriella och offentliga säkerhetsapplikationer

Dragonfish Standard mångsidig multiuppdrags eVTOL-dron
Balanserad uthållighet, flexibilitet i nyttolast och snabb driftsättning för industriella och offentliga säkerhetsapplikationer
Tyst flygning
Dragonfish uppnår ultratyst flygning tack vare sitt exceptionella framdrivningssystem och innovativa brusreducerande design. Knappt hörbar över 120 m AGL*, vilket minskar risken för upptäckt avsevärt samtidigt som det säkerställer operativ sekretess.
Läs mer >>

Tyst flygning
Dragonfish uppnår ultratyst flygning tack vare sitt exceptionella framdrivningssystem och innovativa brusreducerande design. Knappt hörbar över 120 m AGL*, vilket minskar risken för upptäckt avsevärt samtidigt som det säkerställer operativ sekretess.
Läs mer >>
Överlägsen anti-interferens
I komplexa miljöer upprätthåller drönaren exceptionell kommunikations- och videoöverföringsprestanda, med starka anti-störningsfunktioner och stabil, pålitlig överföring.

Överlägsen anti-interferens
I komplexa miljöer upprätthåller drönaren exceptionell kommunikations- och videoöverföringsprestanda, med starka anti-störningsfunktioner och stabil, pålitlig överföring.
Varför proffs väljer Dragonfish Standard?

GNSS-förlustskydd
Vid drift i miljöer utan GNSS aktiverar drönaren landningsskydd och landar automatiskt från sin aktuella position för att garantera säkerheten.
Återgång vid låg batterinivå
Användare kan anpassa den förväntade batterinivån vid landning. Drönaren beräknar den optimala återvändstidpunkten i realtid baserat på aktuell batterinivå och flygstatus, vilket säkerställer att den landar med en batterinivå nära den användardefinierade tröskeln.
Förlorad signalåtergång
Om signalen mellan drönaren och markstationen avbryts aktiveras skyddet mot förbindelseförlust. Om GNSS-signaler finns tillgängliga initierar drönaren automatisk återgång till hemmet.
Manuell nödmanöver
I en nödsituation kan du när som helst växla fjärrkontrollen till M-läge för att omedelbart ta manuell kontroll, vilket garanterar flygsäkerheten.

Flera uppsägningar, vilket säkerställer uppdragssäkerhet
eVTOL har redundans på flera nivåer över viktiga komponenter (batterier, sensorer, kommunikationsbussar) och autonom lägesomkoppling, vilket säkerställer stabil flygning och tillförlitlig prestanda även i komplexa miljöer.
Självkontroll med ett tryck
Utför automatiskt en systemkontroll före start, vilket säkerställer att varje flygning är säker och tillförlitlig.
Enknappsåtergång
Enkel återgång till hemmet med hemknappen. Praktisk förvaring: Organisera snabbt efter flygning, enkel att förvara och redo för nästa användning.
Intelligent spårning
Drönaren kan låsa sig på sina mål och flexibelt justera sin flygbana. Stöder flera spårningslägen.

Start och landning av mobil plattform
Stöder start och landning på rörliga plattformar.
Specifikationer för Dragonfish Dragonfish Standard
| Specifikation | Detaljer |
| Typ | Tilt-Rotor Multi-Mission eVTOL UAV |
| Mått | 1948 × 3295 × 520 mm (inklusive propellrar) |
| Vikt | 7,5 kg (inkl. 2 batterier, propellrar; exkl. gimbal-nyttolast) |
| Maximal nyttolastkapacitet | 1,5 kg |
| Max flygtid | 126 minuter (med standardnyttolastkonfiguration) |
| Max horisontell hastighet | 120 km/h |
| Max horisontell hastighet | 126 km/h (35 m/s) |
| Maximal vindmotstånd | 15 m/s (läge med fasta vingar), 12 m/s (läge med vertikal flygning) |
| Max servicetak | 5000 m över havet |
| Driftstemperatur | -20°C till 50°C |
| IP-klassificering | IP43 |
| GNSS-stöd | GPS + GLONASS + BeiDou + Galileo (positionering i flera konstellationer) |
| Maximal signalöverföringsräckvidd | 30 km |
| Implementeringstid | ≤5 minuter (verktygslös snabbkoppling) |
Storleksjämförelse

Tillbehör

Dragonfish markstation

Autel Smart Antenna Transmission (ASAT) (tillval)

Autel Dragonfish Nest (valfritt)

Dragonfish-repeater (valfritt)
Anpassningsprodukt

Kustbekämpning av smuggling

Polisbekämpning

Förebyggande av skogsbränder

Inspektion av kraftledningar

Trafikinspektion




